Comme le petit robot “Nestor” ,le robot “puzzle” a été réalisé dans le but de me familiariser avec l’utilisation et la
programmation des microcontrôleurs PIC mais avec une réalisation mécanique et un programme un peu plus compliqués.
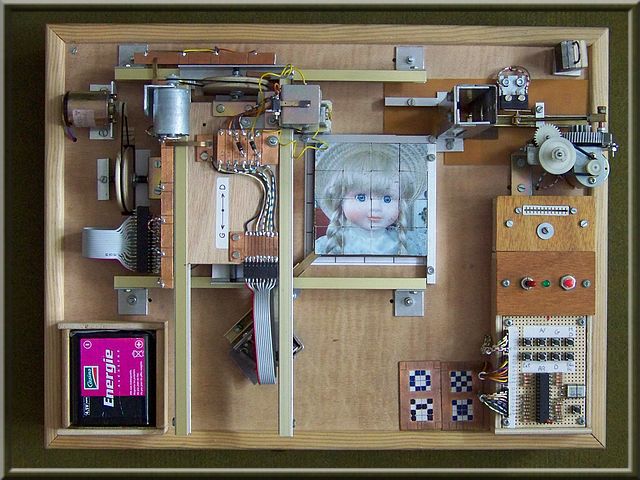
16 petites pièces carrées de 2 cm X 2 cm constituant le puzzle sur lesquelles ont été collées les 16 portions d’une
photo représentant la tête d’une poupée, sont empilées dans le désordre, le rôle du robot étant de placer correctement ces pièces afin de reconstituer la photo.
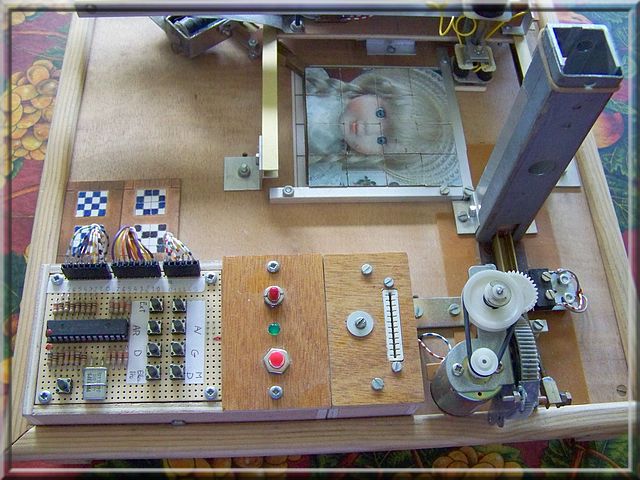
Ce robot est constitué des éléments suivants :
- un casier pour recevoir les 16 pièces placées dans le désordre.
- un mécanisme extracteur constitué d’un moteur avec réducteur.
- un système de préhension des pièces comportant deux électroaimants, un électroaimant pour saisir les pièces éjectées et un électroaimants pour relever ou abaisser l’électro précédent afin de permettre le transport et le dépôt des pièces dans la zone d’assemblage du puzzle.
- un moteur avec système réducteur (poulie et tige filetée) pour le déplacement du système de préhension suivant l’axe des X.
- un moteur avec système réducteur (poulie et tige filetée) pour le déplacement du système de préhension suivant l’axe des Y.
- un mécanisme avec électroaimant dont le rôle est de resserrer les pièces du puzzle une fois la reconstitution terminée.
- un système détecteur permettant au “cerveau” d’orienter chaque pièce à la bonne place.
- l’ensemble des circuits électrique et électronique permettant au “cerveau” de commander les éléments ci-dessus
conformément au programme établi.
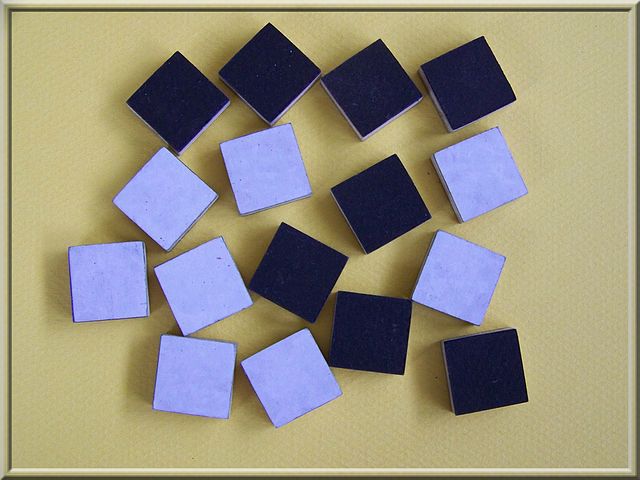
Une autre possibilité du robot “puzzle”
8 pièces noires et 8 pièces blanches sont mises en désordre dans le casier, puis on fait le choix parmi les deux cartes à enficher sur lesquelles sont représentées les 4 figures que le robot peut réaliser suivant celle que l’on veut voir apparaitre, on met la carte dans le connecteur prévu à cet effet en plaçant la figure à réaliser près de ce dernier et on lance l’opération.
Le “cerveau” est un microcontrôleur PIC 16F876A.
Le programme est réalisé en langage “BASIC”.
les dimensions du robot : longueur 40 cm, largeur 30 cm, hauteur 20 cm.
Alimentation générale 12 volts =.
(Pour plus de photos voir l'album "Robot puzzle",un clic sur les photos pour les agrandir)